BE 2025-2026: Difference between revisions
No edit summary |
No edit summary |
||
| Line 3: | Line 3: | ||
Pour l'année académique 2025/2026, le module d'initiation aux systèmes embarqués est organisé sur le mode du projet. Chaque groupe doit réaliser un système embarqué. | Pour l'année académique 2025/2026, le module d'initiation aux systèmes embarqués est organisé sur le mode du projet. Chaque groupe doit réaliser un système embarqué. | ||
== Déroulé du BE == | |||
Le BE se déroule en plusieurs phases : | |||
* voir les réalisations des SE3 : [https://projets-se.plil.fr/mediawiki/index.php/Premier_syst%C3%A8me_embarqu%C3%A9] ; | * réflexion et choix d'un sujet autours des systèmes embarqués. Le choix est libre en intégrant les limites ce ce qui est réalisable dans le temps imparti et avec les ressources disponibles à Polytech Lille et en intégrant un microcontrôleur ; | ||
* voir les réalisations des SE4 : [https://projets-se.plil.fr/mediawiki/index.php/Pico-ordinateur] ; | * conception de la carte en s'appuyant fortement sur les cartes réalisées par leurs ainés : | ||
* voir les réalisations des I2L : [https://wiki-se.plil.fr/mediawiki/index.php/Master_I2L]. | * voir les réalisations des SE3 : [https://projets-se.plil.fr/mediawiki/index.php/Premier_syst%C3%A8me_embarqu%C3%A9] ; | ||
* voir les réalisations des SE4 : [https://projets-se.plil.fr/mediawiki/index.php/Pico-ordinateur] ; | |||
* voir les réalisations des I2L : [https://wiki-se.plil.fr/mediawiki/index.php/Master_I2L]. | |||
* réalisation des cartes électroniques : | |||
* les cartes sont fabriqués par un industriel ; | |||
* à réception, les étudiants assemblent les cartes (i.e. soudent les composants sur la carte) | |||
* tests de bon fonctionnement des cartes | |||
* programmation embarquée de la carte en langage C. | |||
La liste des compétences que vous développerez est large : | |||
La liste des compétences que vous développerez est | |||
* compétences en électronique numérique et, dans une moindre mesure, en électronique analogique ; | * compétences en électronique numérique et, dans une moindre mesure, en électronique analogique ; | ||
* compétences en programmation bas niveau, c'est à dire en C pour microcontrôleurs ; | * compétences en programmation bas niveau, c'est à dire en C pour microcontrôleurs ; | ||
* compétences en manipulation sous Unix, la chaîne de conception étant entièrement sous Linux. | * compétences en manipulation sous Unix, la chaîne de conception étant entièrement sous Linux. | ||
== Fonctionnalités == | == Fonctionnalités == | ||
| Line 26: | Line 29: | ||
Comme capteurs vous pouvez utiliser les dispositifs suivants : | Comme capteurs vous pouvez utiliser les dispositifs suivants : | ||
* des boutons | * des boutons ; | ||
* un microphone avec un étage d'amplification et l'utilisation du convertisseur analogique vers numérique du microcontrôleur ; | * un microphone avec un étage d'amplification et l'utilisation du convertisseur analogique vers numérique du microcontrôleur ; | ||
* des capteurs de lumière voire des systèmes complets comme un QRE1113 ; | * des capteurs de lumière voire des systèmes complets comme un QRE1113 ; | ||
| Line 33: | Line 36: | ||
Comme actionneurs vous pouvez utiliser les composants suivants : | Comme actionneurs vous pouvez utiliser les composants suivants : | ||
* des LED | * des LED, classiques ou RGB, gérées par des pilotes de LED si ces LED sont en nombre important ; | ||
* un haut-parleur en utilisant un convertiseur numérique vers analogique et un étage d'amplification ; | * un haut-parleur en utilisant un convertiseur numérique vers analogique et un étage d'amplification ; | ||
* un écran LCD texte comportant un contrôleur HD44780 ou compatible ; | * un écran LCD texte comportant un contrôleur HD44780 ou compatible ; | ||
| Line 117: | Line 120: | ||
| | | | ||
| [[BE_2025_Groupe10|Groupe 10 2025/2026]] | | [[BE_2025_Groupe10|Groupe 10 2025/2026]] | ||
|- | |||
| Groupe 11 | |||
| Prénom NOM & Prénom NOM | |||
| | |||
| [[BE_2025_Groupe11|Groupe 11 2025/2026]] | |||
|- | |||
| Groupe 12 | |||
| Prénom NOM & Prénom NOM | |||
| | |||
| [[BE_2025_Groupe12|Groupe 12 2025/2026]] | |||
|- | |- | ||
|} | |} | ||
Revision as of 09:13, 21 November 2025
Bureau d'études en systèmes embarqués
Pour l'année académique 2025/2026, le module d'initiation aux systèmes embarqués est organisé sur le mode du projet. Chaque groupe doit réaliser un système embarqué.
Déroulé du BE
Le BE se déroule en plusieurs phases :
- réflexion et choix d'un sujet autours des systèmes embarqués. Le choix est libre en intégrant les limites ce ce qui est réalisable dans le temps imparti et avec les ressources disponibles à Polytech Lille et en intégrant un microcontrôleur ;
- conception de la carte en s'appuyant fortement sur les cartes réalisées par leurs ainés :
* voir les réalisations des SE3 : [1] ; * voir les réalisations des SE4 : [2] ; * voir les réalisations des I2L : [3].
- réalisation des cartes électroniques :
* les cartes sont fabriqués par un industriel ; * à réception, les étudiants assemblent les cartes (i.e. soudent les composants sur la carte) * tests de bon fonctionnement des cartes
- programmation embarquée de la carte en langage C.
La liste des compétences que vous développerez est large :
- compétences en électronique numérique et, dans une moindre mesure, en électronique analogique ;
- compétences en programmation bas niveau, c'est à dire en C pour microcontrôleurs ;
- compétences en manipulation sous Unix, la chaîne de conception étant entièrement sous Linux.
Fonctionnalités
Il vous est demandé d'imaginer un système embarqué. A priori nous vous imposons d'utiliser un microcontrôleur AVR ATmega32u4. L'intérêt de ce microcontrôleur est la facilité de téléchargement d'un code en utilisant une simple connexion USB.
Une fois le micro-contrôleur fixé, vous devez sélectionner les capteurs et les actionneurs de votre système embarqué.
Comme capteurs vous pouvez utiliser les dispositifs suivants :
- des boutons ;
- un microphone avec un étage d'amplification et l'utilisation du convertisseur analogique vers numérique du microcontrôleur ;
- des capteurs de lumière voire des systèmes complets comme un QRE1113 ;
- un détecteur d'obstacle courte portée comme un OPB733TR ;
- un détecteur d'obstacle type sonar HC-SR04 ...
Comme actionneurs vous pouvez utiliser les composants suivants :
- des LED, classiques ou RGB, gérées par des pilotes de LED si ces LED sont en nombre important ;
- un haut-parleur en utilisant un convertiseur numérique vers analogique et un étage d'amplification ;
- un écran LCD texte comportant un contrôleur HD44780 ou compatible ;
- un écran LCD graphique comportant un contrôleur SSD1306 ou compatible ;
- des moteurs, via un contrôleur de moteur ou non suivant la puissance demandée ;
- des servo-moteurs ...
Vous pouvez aussi rendre votre système plus autonome en incluant une batterie et une puce de contrôle de charge de batterie.
Vous pouvez stocker des informations dans une mémoire flash de type AT45DB641E.
Enfin il est envisageable d'utiliser une communication radio via une puce NRF24L01.
Exemple de carte
Les fonctionnalités de 5 projets de vos ainés ont été réunies dans une carte dont la particularité est d'utiliser une batterie LiPo. Les fonctionnalités intégrées à cette carte sont :
- recharge de batterie LiPo et basculement manuel sur batterie ;
- haut-parleur avec étage d'amplification ;
- microphone avec étage d'amplification ;
- affichage sur écran LCD 2 lignes de 16 caractères ;
- des connecteurs pour utilisation d'un servo-moteur et d'un sonar ultra-son ;
- des connecteurs pour utilisation de 4 détecteurs de mouvement ou de trois détecteurs de lumière ou de 4 boutons.
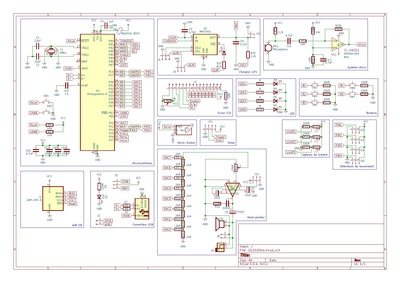

- schéma (projet KiCAD) : File:I2L-2025-Carte-batterie.zip
Réalisations des groupes
| Numéro de groupe | Etudiants | Titre du projet | Composants | Page |
|---|---|---|---|---|
| Groupe 1 | Prénom NOM & Prénom NOM | Groupe 1 2025/2026 | ||
| Groupe 2 | Prénom NOM & Prénom NOM | Groupe 2 2025/2026 | ||
| Groupe 3 | Prénom NOM & Prénom NOM | Groupe 3 2025/2026 | ||
| Groupe 4 | Prénom NOM & Prénom NOM | Groupe 4 2025/2026 | ||
| Groupe 5 | Prénom NOM & Prénom NOM | Groupe 5 2025/2026 | ||
| Groupe 6 | Prénom NOM & Prénom NOM | Groupe 6 2025/2026 | ||
| Groupe 7 | Prénom NOM & Prénom NOM | Groupe 7 2025/2026 | ||
| Groupe 8 | Prénom NOM & Prénom NOM | Groupe 8 2025/2026 | ||
| Groupe 9 | Prénom NOM & Prénom NOM | Groupe 9 2025/2026 | ||
| Groupe 10 | Prénom NOM & Prénom NOM | Groupe 10 2025/2026 | ||
| Groupe 11 | Prénom NOM & Prénom NOM | Groupe 11 2025/2026 | ||
| Groupe 12 | Prénom NOM & Prénom NOM | Groupe 12 2025/2026 |