Enseignement de spécialité SE 2023/2024 Groupe 2 / B7
Chaîne de commande de système embarqué
Cette page est un exemple. N'oubliez pas de remplacer GG par votre numéro de groupe et BB par votre numéro de binôme dans tous les noms de documents. Cliquez simplement sur le lien rouge pour téléverser un document.
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD : ma carte électronique.
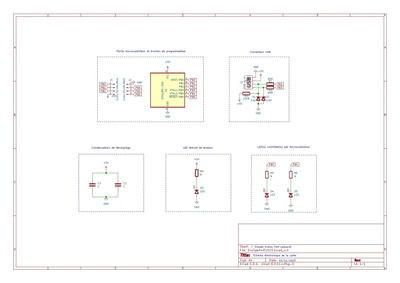
Schéma électronique de la carte :
Résultat du routage :

Photo de la carte soudée :

Vidéo très courte et en basse résolution de la carte en fonctionnement :
Site Web
Code de la page PHP (toujours un espace en première colonne) :
<?php ... ?>
Copie écran du formulaire HTML :

Application mobile
Partie principale des blocs de mon application :

Bilan
J'indique où j'en suis arrivé à la fin des séances.
Séance 1: Notre schéma électronique est terminé. Il comprenait le montage de deux condensateurs de découplage en parallèle, d'une LED témoin de tension ainsi que de 2 LED(s) contrôlées par microcontrôleur (voir fichier pdf)
Séance 2: Nous avons continué le routage puis achevé celui-ci en fin de séance. Problème rencontré: chaque composant ayant une masse doit être relié ensemble. Solution: le bord de la carte fait physiquement office de masse, ce qui permet de simplifier le circuit. Nous avons tout de même relié plusieurs composants à la masse partant du port USB. En l'occurence, D2 est directement relié à la masse du port USB et D1 est relié à la masse de D2 ce qui permet de valider le circuit puisque ce composant ne se situait pas au bord de la carte.
Séance 3: Dans le début de la séance, nous avons commencé la prise en main de MIT App Inventor avec les différents blocs. Puis, nous avons commencé la soudure de notre carte. Le but de la soudure est d'obtenir une soudure en forme de ménisque. Une "boule" ne suffirait pas à bien souder et si nous rencontrons ce problème, il faut refaire chauffer la soudure afin d'obtenir un meilleur résultat. Par la suite, nous avons soudé au total nos 5 résistances. Nous avons rencontré des difficultés durant la soudure du fait de la taille de notre carte (celle-ci étant plus petite que celle attendue). Cependant, grâce aux outils que nous possédions, nous avons pu souder avec précision, notamment grâce à la caméra numérique qui nous a permis de zoomer sur la soudure et souder, de ce fait, avec précision.
Séance 4: Nous continuons la soudure, ici la soudure de nos LED. Elles seront jaunes. Lorsque nous soudons les LED, nous devons, contrairement aux résistances, prendre en compte le sens du courant. En l’occurrence, le triangle dessiné sur les LED doit être dirigé vers la masse. Les condensateurs ne seront pas soudés durant la séance par manque de temps. Nous rencontrons des difficultés à souder. En effet, le bout du soudeur n'était plus aussi efficace. La panne (= le bout) de notre soudeur était oxydée. Nous avons augmenté la température et rencontrions toujours le même problème. Après avoir appelé notre professeur, le problème a été résolu après nettoyage de la panne. Cependant, du fait de la taille réduite de notre carte (dû aux empreintes choisies lors de la deuxième séance), la tâche est complexe mais faisable après plusieurs essais. A la fin de la séance, nous arrivons à 3 LED soudées seulement. La dernière séance sera consacrée à l'application MIT App Inventor ainsi qu'au serveur web. Afin de ne pas perdre trop de temps durant la séance, nous comptons avancer sur l'application MIT App Inventor afin de se consacrer au serveur web durant la majeure partie de la séance.
Eventuellement la vidéo brève du fonctionnement complet de la chaîne de commande : Media:2023_ES_02_07_bilan.mp4