BE 2025 Groupe4: Difference between revisions
No edit summary |
No edit summary |
||
| Line 40: | Line 40: | ||
[[File:Brochage nf24.png|thumb|right|400px]] | [[File:Brochage nf24.png|thumb|right|400px]] | ||
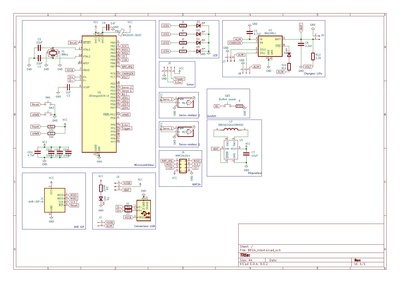
[[File:LTC3531.png|thumb|right|400px]]Nous avons continuer notre schéma kicad tout en prenant en considération les différents composants vus à droite qui | [[File:LTC3531.png|thumb|right|400px]]Nous avons continuer notre schéma kicad tout en prenant en considération les différents composants vus à droite qui n'existait pas dans kicad. <div style="clear: both;"> | ||
''SE3Groupe2024-2'' | ''SE3Groupe2024-2'' | ||
Revision as of 16:47, 6 February 2026
Proposition d'objet
Nous avons pour idée de faire un robot télécommandé qui se déplace avant/arrière et gauche/droite.
Liste de matériel:
- chassis (pas de taille)
- roues
- arbre
- 2 moteurs
- carte électronnique
- cables
- pile et support
- (télécomande et récepteur signal)
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD : File:2025 BE G4 kicad.zip.
Schéma électronique de la carte :
Résultat du routage :

Photo de la carte soudée :
Vidéo très courte et en basse résolution de la carte en fonctionnement :
Travail effectué
Séance du 22 janvier


{kind=link}
Nous avons continuer notre schéma kicad tout en prenant en considération les différents composants vus à droite qui n'existait pas dans kicad.
SE3Groupe2024-2
Séance du 23 janvier
probleme: batterie: 3.7v alors que nrf24 max 3.6v
Modélisation sur kicad et début du routage
Séance du 5 février
Finition du routage (enlever toutes les erreurs(design rules checker) rappeler de chercher un L (aller sur projet se : se3 2024 regulateur: LTC3531)
changer le schéma et le mettre avec le ltc, changer le matériel
ref L: B82462G4103M000