BE 2025 Groupe4
Proposition d'objet
Nous avons pour idée de faire un robot télécommandé qui se déplace avant/arrière et gauche/droite.
Liste de matériel:
- chassis (pas de taille)
- roues
- arbre
- 2 moteurs
- carte électronnique
- cables
- pile et support
- télécomande et récepteur signal
- NRF24
- LTC3531
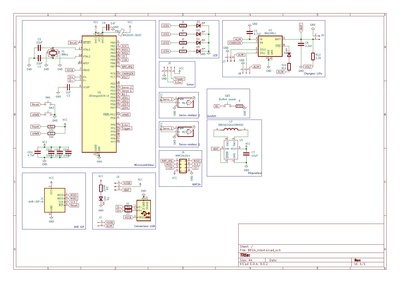
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD : File:2025 BE G4 kicad.zip.
Schéma électronique de la carte :
Résultat du routage :

Photo de la carte soudée :
Vidéo très courte et en basse résolution de la carte en fonctionnement :
Travail effectué
Séance du 22 janvier


{kind=link}
Nous avons continuer notre schéma kicad tout en prenant en considération les différents composants vus à droite qui n'existait pas dans kicad.
SE3Groupe2024-2
Séance du 23 janvier
probleme: batterie: 3.7v alors que nrf24 max 3.6v que nous avons réglé avec le régulateur LTC3531
Modélisation sur kicad et début du routage
Séance du 29 janvier
Nous avons continué le routage de la carte.
Séance 30 janvier
De même et nous avons enfin créer le composant LTC3531 sur Kicad avec quelques soucis pour faire les empreintes.
Séance du 5 février
Nous avons continuer le routage avec les dernières connexions mais nous devions attendre de trouver la bobine qui serait la plus adéquate pour le régulateur.
Séance 6 février
Nous avons enlever toutes les erreurs de routage et compléter notre wiki avec les photos et les fichiers
(aller sur projet se : se3 2024 regulateur: LTC3531)
ref L: B82462G4103M000